
Active Debris Removal
 Studies indicate that orbital debris has reached a level at which further debris growth will continue unbounded unless measures are taken to actively reduce the debris population and mass. “Orbital debris” is a broad class of objects which includes sub-centimeter paint flecks to large derelict satellites and upper- stage boosters. Statistical analysis of the debris population in Earth orbit shows that to maintain or reduce the risk of future impacts, five to ten large objects should be removed from the most populated orbits every year
Studies indicate that orbital debris has reached a level at which further debris growth will continue unbounded unless measures are taken to actively reduce the debris population and mass. “Orbital debris” is a broad class of objects which includes sub-centimeter paint flecks to large derelict satellites and upper- stage boosters. Statistical analysis of the debris population in Earth orbit shows that to maintain or reduce the risk of future impacts, five to ten large objects should be removed from the most populated orbits every year
Capture Mechanism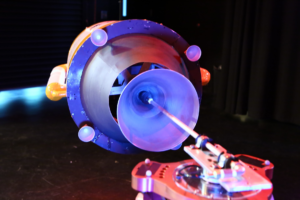
Upper stage rocket boosters make excellent targets for orbital debris removal for a number of reasons: (1) Their large size provides for reliable identification and tracking. (2) They make up a large fraction of the debris population, both in terms of number of objects (over 1,000) and total mass. (3) There are multiple orbital inclinations with high concentrations of rocket bodies. (4) All second stage boosters have a similar de Laval nozzle that can be used as a grappling feature. (5) Boosters have a sturdy construction and straightforward load path for grappling spacecraft. LASR has developed a custom graping mechanism to capture rocket noses to go after these boosters. This mechanism relies on the common converging-diverging shape of rocket nozzles by inflating an air bag within the throat and holding the nozzle using the opposing air pressure to hold the system in place.
ADR Experiments
 A critical step for successful autonomous orbital debris removal missions is high fidelity ground-based simulations. To support experimental validation of sensing and control algorithms related to such missions, LASR has recently developed a guidance, navigation, and control system complete with sensor package, custom target recognition software, and vehicle emulation capabilities. The LASR GNC system (LGNC) is designed to be outfitted to a capture vehicle and incorporates relative, vision-based measurements and data from an inertial measurement unit to estimate state variables necessary for proximity operations missions.
A critical step for successful autonomous orbital debris removal missions is high fidelity ground-based simulations. To support experimental validation of sensing and control algorithms related to such missions, LASR has recently developed a guidance, navigation, and control system complete with sensor package, custom target recognition software, and vehicle emulation capabilities. The LASR GNC system (LGNC) is designed to be outfitted to a capture vehicle and incorporates relative, vision-based measurements and data from an inertial measurement unit to estimate state variables necessary for proximity operations missions.
The mission handler can be configured to compute and command trajectories related to various test scenarios for spacecraft rendezvous. Additional vehicle emulation capabilities allow client dynamics to be loaded into the system and motions carried out in the laboratory by HOMER. The sensing systems available can then be used to characterize the effectiveness of different sensors and controllers in the presence of true noise and latency.